ESP32-based Online Pet Treat Dispenser
Streaming treats from a phone
I recently discovered the 28BYJ series of stepper motor - they run on 5V, so no need for a 12V separate power supply (although they should be powered separately to the microcontroller) and they’re remarkably good value (I bought a few for around £2/each).
This led to me wanting to build a treat dispenser for the cat, and it’d be cool if I could see the cat too, so I could use it remotely when out of the house.
I started thinking about a sort of Ferris-wheel approach, but after a casual look on Thingiverse, I actually found user ‘CptPicard’ had already made a decent model of an Auger-based system with a hopper and 28BYJ motor mount.
So I decided to run it through the 3D printer and it came out looking pretty perfect, barring some sanding down of points where my supports had attached.
Parts
- 28BYJ 5V Stepper
- ULN2003a driver board (usually supplied with the motor)
- ESP32-CAM
- MicroUSB Female Socket
- 3D printed Auger/hopper/motor amount
- Plywood & Hinges/Magnets
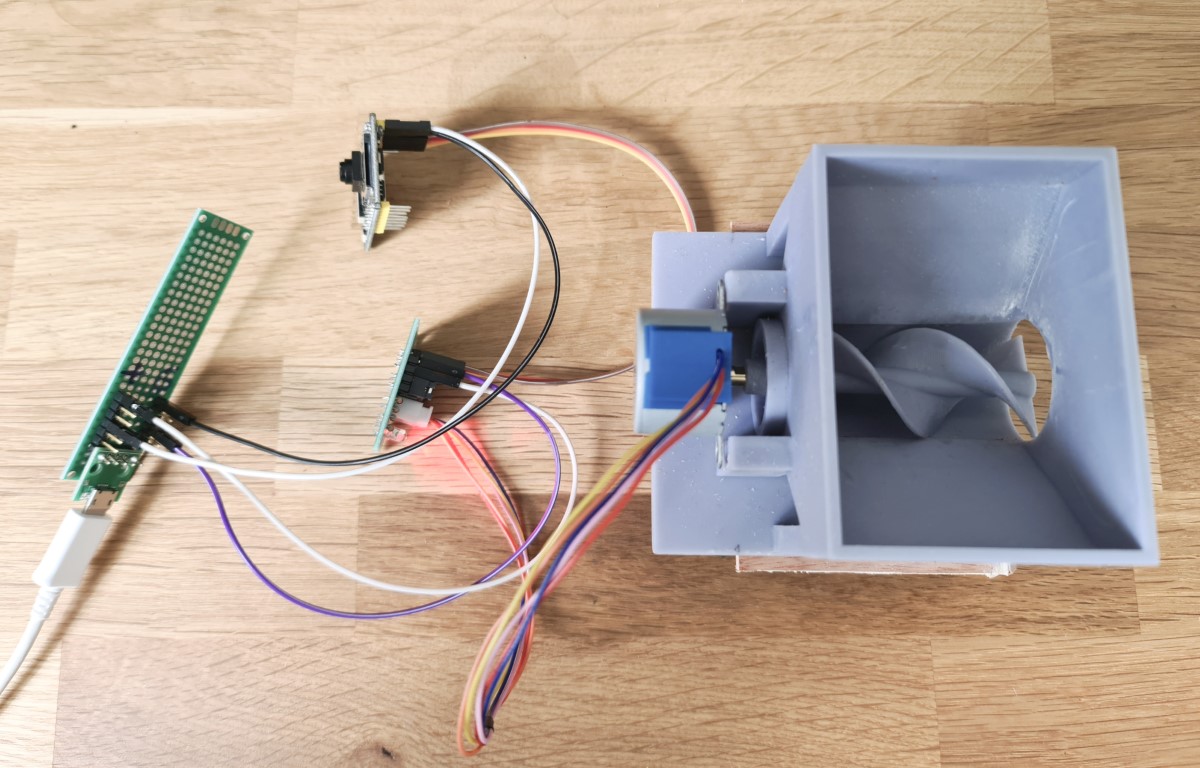
Circuit
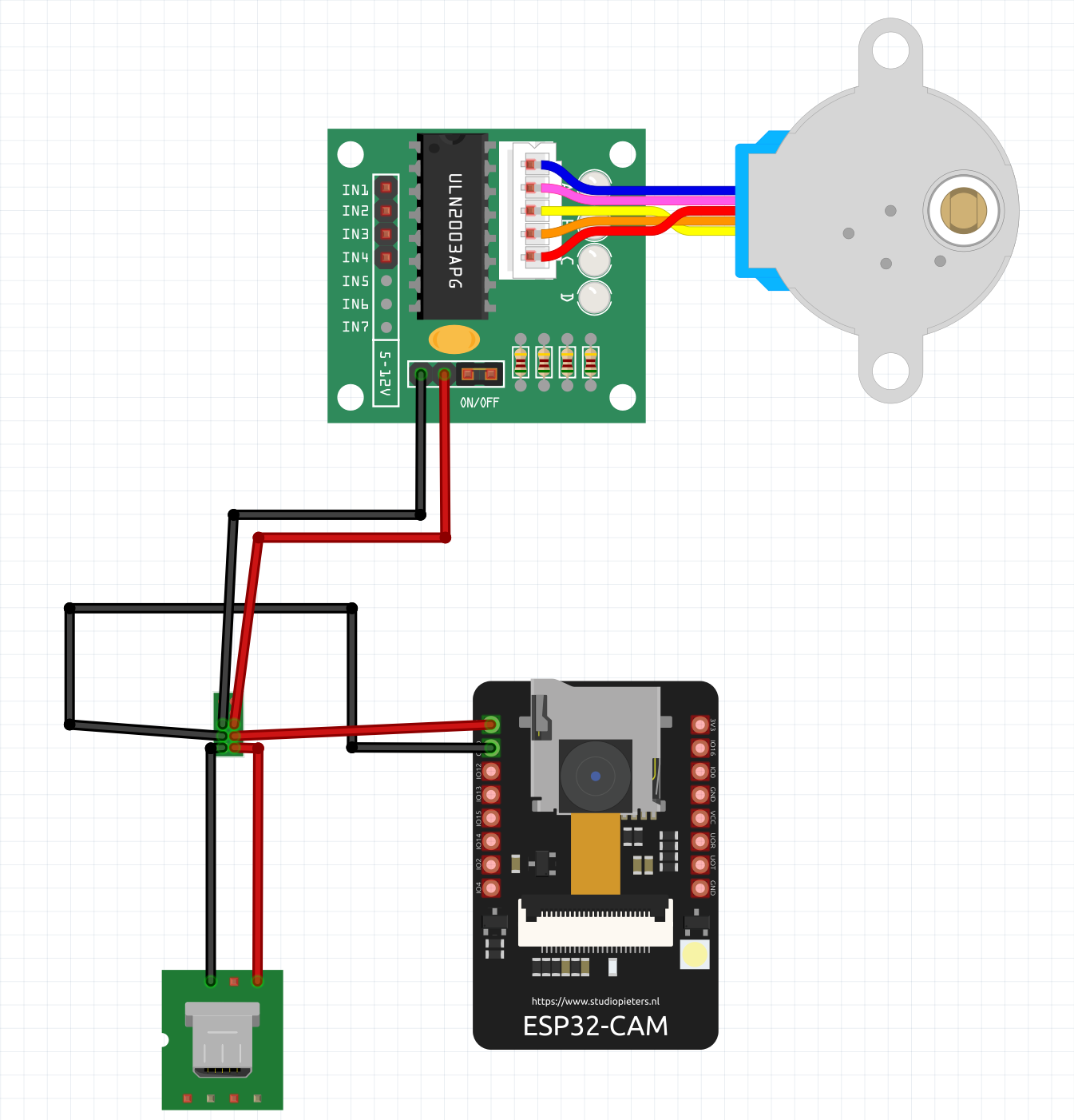
The circuit consists of a MicroUSB socket which makes it easier to power with a choice of cable (providing enough amperage is given to the motor). I soldered this to a row of headers as power bus for 5V and Ground. I could’ve added data and hooked it up to the ESP32 for programming, but went with OTA updates instead.
If someone were to replicate this, you’d probably want a capacitor over the power supply for the motor and a diode to prevent backflow from the motor spinning…
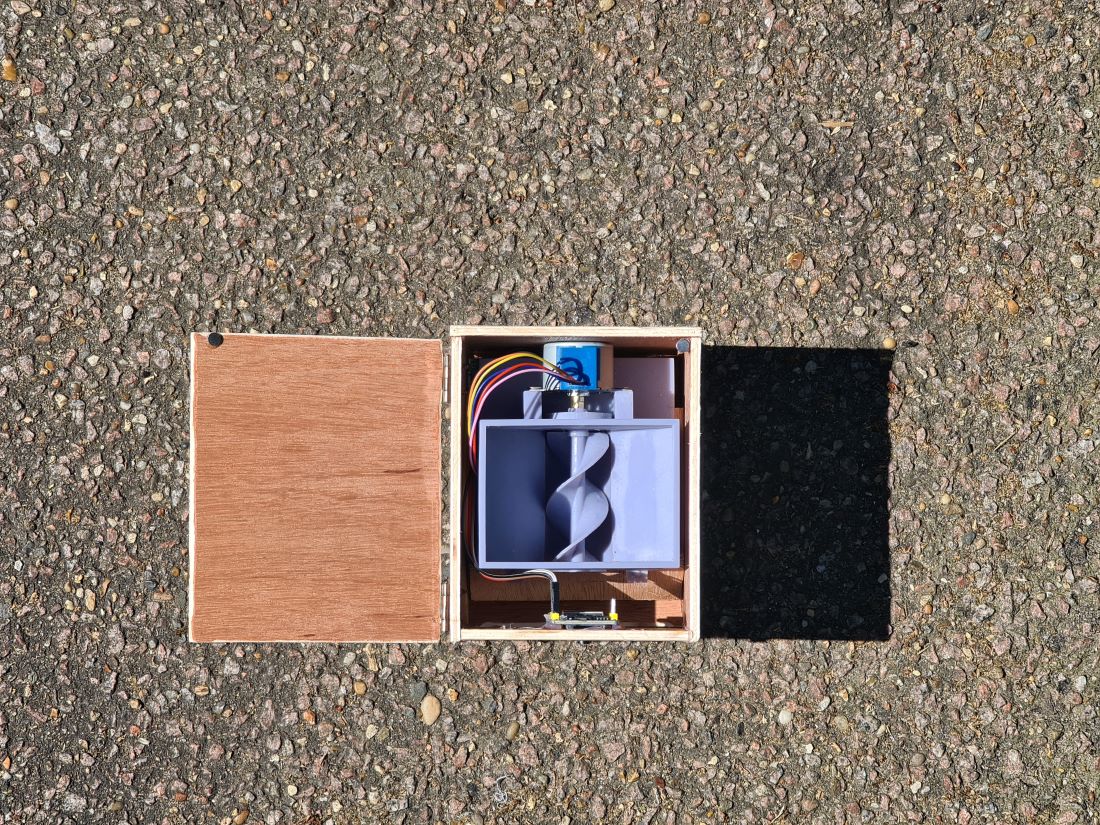
Here is the circuit hooked up with simple dupont wires ready to be inserted into the box.
This was a test run of the motor chucking out treats:
**click here to show**
Code
The code is uploaded here.
This is similar to my other MQTT-based sensors and gizmos. It connects to Wifi, then the MQTT server to send and receive messages.
It includes:
- The basic ESP32-CAM examples of a simple server to stream video from the camera to a local IP address
- A callback that takes messages sent to a topic and tells the motor to go to that number of steps
- The callback will also take any messages starting with a ‘0’ as a speed instruction, so it can be sped up
- A heartbeat message that publishes a message every 10 minutes to tell the server it’s alive (and keep it connected)
- The typical ArduinoOTA script for pushing code over the network instead of plugging it in
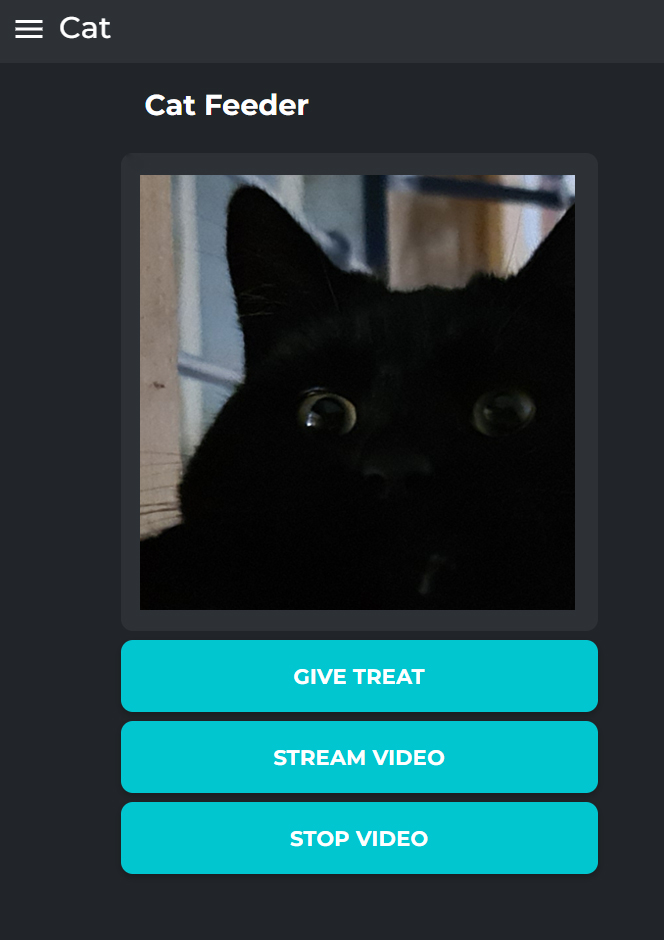
On its own, the box won’t do anything, so I used my NodeRed backend to:
- Build a dashboard page to control the feeder and view the stream
- Have a ‘Give Treat’ button that moves the stepper forward 1500 steps (enough to give a few treats)
- Stop the video stream if desired
My simple control dashboard:
Build
I went with a basic 3mm plywood box, very roughly approximated on the table saw and then lumped together with hot glue. Not pretty, but does the job. Dremel with a router bit made holes for the micro USB socket and the camera. Spray painted cat symbols may add some level of understanding what it’s for. Not for the cat though.
A few small hinges give the lid support…

…while two small magnets glued in place hold the lid closed and give a satisfying click shut. This is the same process as used on the Retro TV, applying CA glue to the magnets and then closing the lid to put them in the right place.

The USB power bus was hotglued into the base, and the ESP32Cam glued in place at the front (I’m hoping if I re-purpose this, the glue just snaps off…)
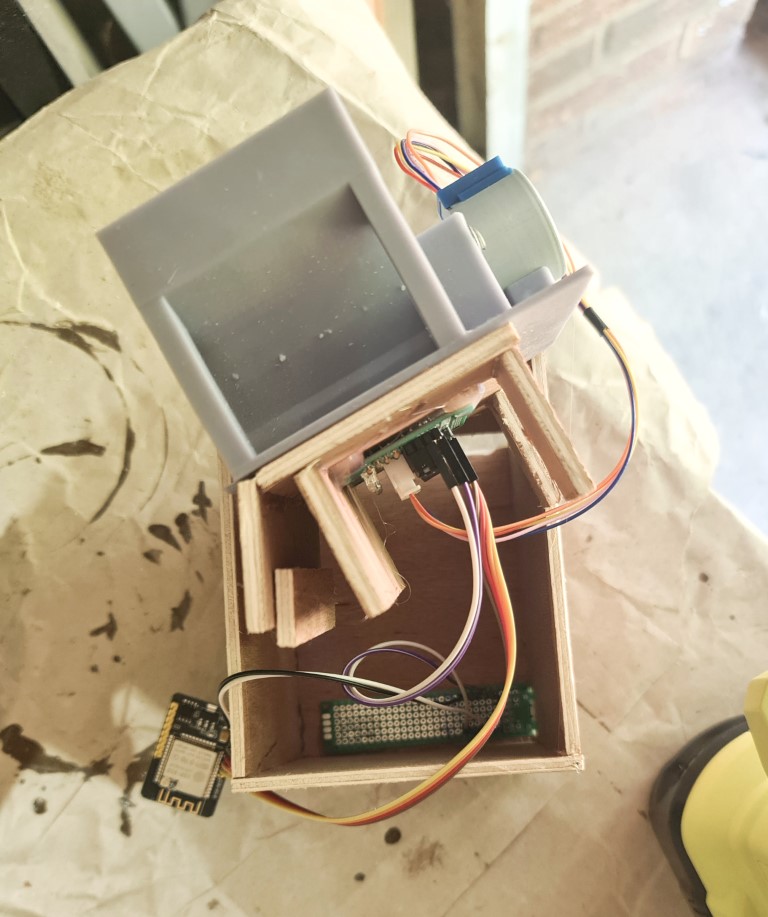
And here it is finally assembled.


And a GIF of it in action with the phone-controlled NodeRed page:
**Click Here to Expand**